El kit de robótica ED1 del Citilab se empezó a diseñar a partir de las necesidades detectadas durante el desarrollo del proyecto EduLab en las escuelas de Cornellà de Llobregat.
Ya existía un precedente, el EDUKIT basado en Arduino, que se usó en algunas escuelas e institutos. La idea era disponer de un kit económico, con el material necesario para trabajar actividades relevantes para el entorno educativo y que fuera fácil de programar, en este caso con S4A y Snap! for Arduino.

La semiesfera disponía de 6 sensores táctiles hechos con chinchetas, conectados a un Arduino Nano con una pequeña placa diseñada por el Citilab. La energía la proporcionaba una batería para cargar móviles, ubicada en la parte inferior del chasis.
El robot funcionaba con motores de rotación continua y le faltaba cierta precisión para moverse dentro de los cuadros de las alfombras que se usaban en Ciclo Infantil. Además, para hacerlo autónomo era necesario trabajar directamente en Arduino.
En el verano de 2018 comienza el diseño de una nueva versión del robot, llamada internamente EduBot2. Se consideró necesario hacer una revisión y actualización completa: nuevos motores, nuevo chasis y nueva placa.
Para el rediseño se formó un grupo de trabajo integrado por el equipo de EduLab del Citilab, Miguel Ferrera de CSSI Ibérica para los prototipos de la placa, Kike Montañas por el diseño 3D y Bernat Romagosa en la parte de programación.
El precedente: El EduKit basado en Arduino
Ya existía un precedente, el EduKit basado en Arduino, que se usó en algunas escuelas e institutos. La idea era disponer de un kit económico, con el material necesario para trabajar actividades relevantes para el entorno educativo y que fuera fácil de programar, en este caso con S4A y Snap! for Arduino.



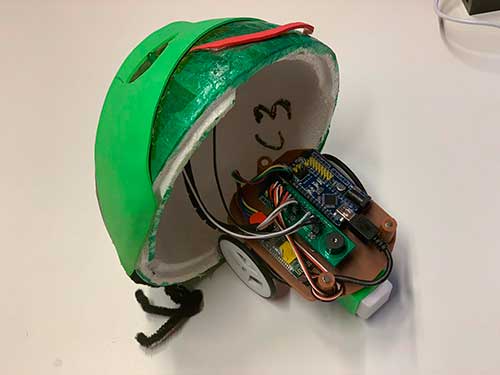

Uno de los retos del proyecto EduLab, era incluir materiales de electrónica y robótica en la Educación Primaria. A partir de la experiencia con el EDUKIT se usó este material en la Escuela Dolores Almeda de Cornellà durante el curso 2017-2018, el centro educativo en el que se llevó a cabo el diseño piloto del proyecto EduLab.
El chasis del robot estaba hecho con impresión 3D y usaba una semiesfera de poliespan desmontable, que decoraba el alumnado de Ciclo Medio. La semiesfera disponía de 6 sensores táctiles hechos con chinchetas, conectados a un Arduino Nano con una pequeña placa diseñada por el Citilab. La energía la proporcionaba una batería para cargar móviles, ubicada en la parte inferior del chasis.
El robot funcionaba con motores de rotación continua y le faltaba cierta precisión para moverse dentro de los cuadros de las alfombras que se usaban en Ciclo Infantil. Además, para hacerlo autónomo era necesario trabajar directamente en Arduino.
Primera evolución: El EduBot2
En el verano de 2018 comienza el diseño de una nueva versión del robot, llamada internamente EduBot2. Se consideró necesario hacer una revisión y actualización completa: nuevos motores, nuevo chasis y nueva placa.
Para el rediseño se formó un grupo de trabajo integrado por el equipo de EduLab del Citilab, Miguel Ferrera de CSSI Ibérica para los prototipos de la placa, Kike Montañas por el diseño 3D y Bernat Romagosa en la parte de programación.

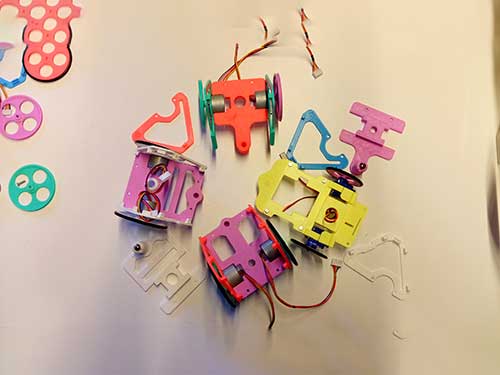


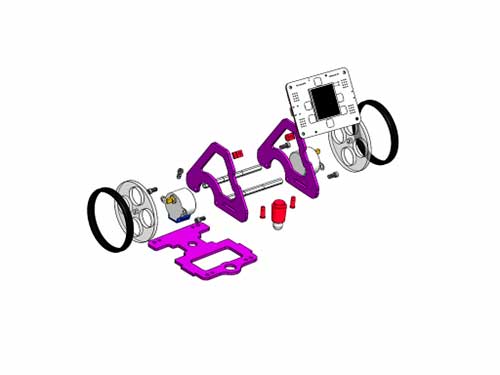
Se utilizaron motores paso a paso para aumentar la precisión, se diseñó un chasis fácil de de fabricar y montar y también nació la placa ED1 programable con microBlocks.
El año 2019 los primeros kits de robótica ED1 se distribuyen en las escuelas de Cornellà de Llobregat. El robot fue bautizado, el nombre fue escogido por las escuelas participantes, y se llamó “Fantástic” (Fantástico).
El kit se puede usar desde Ciclo Infantil hasta Ciclo Superior, tiene mucha más precisión que la anterior y la placa ED1 incluye pantalla a color, botones, pantalla, sensores, conectividad y permite utilizar 2 motores paso a paso directamente.
El resultado es bastante satisfactorio, pero de cara al curso 2019-2020 se mejora el kit de acuerdo con la experiencia de uso en las escuelas y con el fin de reducir costes de producción, a fin de llegar al máximo posible de público.
El robot tiene un nuevo chasis hecho a partir de impresión 3D y plástico metacrilato, un material más económico que permitirá que el robot “Fantàstic” llegue a más escuelas.
En definitiva, se espera que a partir de ahora la evolución del robot “Fantàstoc” sea compartida con las ideas aportadas por la comunidad.
“El máximo gozo es compartir conocimiento”
– Jorge Wagensberg –