El kit de robòtica ED1 del Citilab es va començar a dissenyar a partir de les necessitats que es van trobar al projecte Edulab de les escoles de Cornellà.
El precedent: l’EduKit basat en Arduino
Ja existia un precedent, l’EduKit basat en Arduino, que es va fer servir en algunes escoles i instituts. La idea era disposar d’un kit econòmic, que contingués tot el necessari per treballar activitats rellevants per l’entorn educatiu i que fos fàcil de programar, en aquest cas amb S4A i Snap! for Arduino.




La primera versió
Un dels reptes del projecte EduLab, era incloure materials d’electrònica i robòtica a l’Educació Primària. A partir de l’experiència amb l’EduKit es va fer servir aquest material a l’Escola Dolors Almeda de Cornellà durant el curs 2017-2018, el centre educatiu en el qual es va dur a terme el disseny pilot del projecte EduLab.
El projecte Edulab a les escoles suposava un gran repte, ja que es tractava d’incloure materials d’electrònica creativa i robòtica a primària. El disseny pilot, es va fer amb l’Escola Dolors Almeda de Cornellà i estava basat en Arduino.
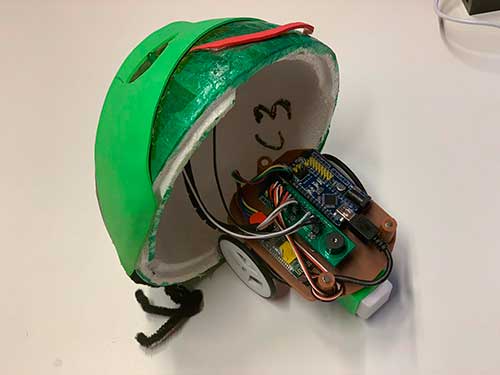
El xassís del robot estava fet amb impressió 3D i portava una semiesfera de poliespan desmuntable, que decorava l’alumnat de Cicle Mitjà. La semiesfera disposava de 6 sensors tàctils fets amb xinxetes, connectats a un Arduino Nano amb una petita placa dissenyada al Citilab. L’energia la proporcionava una bateria per carregar mòbils, ubicada a la part inferior del xassís.
El robot funcionava amb motors de rotació contínua i li faltava certa precisió per moure’s dins dels requadres de les catifes quadriculades que es feien servir a Cicle Infantil. A més, per fer-ho autònom era necessari treballar directament en Arduino.
La segona versió
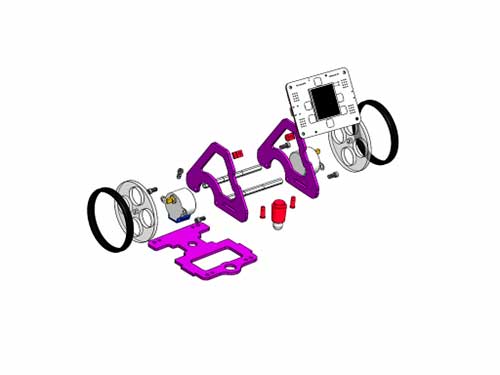
A l’estiu del 2018 es comença el disseny d’una nova versió del robot, anomenada internament EduBot 2. Es va considerar necessari fer una revisió i actualització completa: nous motors, nou xassís i nova placa.
Així doncs, es va formar un grup de treball format per l’equip d’EduLab del Citilab, Miguel Ferrera de CSS Ibèrica per als prototips de la placa, Kike Montanyes pel disseny 3D i Bernat Romagosa en la part de programació.
Es van fer servir motors pas a pas per augmentar la precisió, es va dissenyar un xassís fàcil de muntar i va néixer la placa ED1 programable amb microBlocks.



El kit es pot fer servir des de Cicle Infantil fins a Cicle Superior, el robot té molta més precisió que l’anterior i la placa ED1 inclou pantalla a color, botons, pantalla, sensors, connectivitat i permet fer servir 2 motors pas a pas directament.
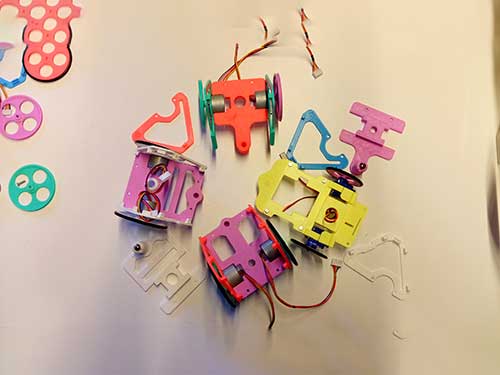
El resultat és prou satisfactori, però de cara al curs 2019-2020 es millora el kit d’acord amb l’experiència d’ús a les escoles i amb la finalitat de reduir costos de producció, per tal d’arribar al màxim possible de públic.
El robot té un nou xassís fet a partir d’impressió 3D i plàstic metacrilat, un material més econòmic que permetrà que el Fantàstic arribi a més escoles.
En definitiva, s’espera que a partir d’ara l’evolució del robot Fantàstic sigui compartida amb les idees aportades per la comunitat.
“El màxim goig és compartir coneixement”
– Jorge Wagensberg –